FRA:고급사양/제품/취출 로봇
개념
플라스틱 사출 성형의 미래를 내다본 로봇을 만들자
많은 사람들이 같은 제품을 사용하고 그 풍요로움을 똑같이 누릴 수 있는 세상.
이 꿈 같은 세상을 실현할 기적을 일으킨 것이 플라스틱 사출 성형 기술이다.
플라스틱 사출 성형은 더 빨리, 더 고품질로, 더 좋은 물건을 추구해 왔다.
이 플라스틱 사출 성형 기술의 장점을 최대한 살리기 위해 활약해 온 것이 바로 취출 로봇이다.
플라스틱 사출 성형의 현장에는 오랫동안 해결되지 못한 과제가 있다.
바로 고난도 성형, 다품종 소량 생산, 인력 부족, 현장에 잠재된 위험이다.
이와 같은 과제 해결에 기여할 수 있는 로봇을 만들자.
그리고 플라스틱 사출 성형의 미래를 내다본 로봇을 만들자.
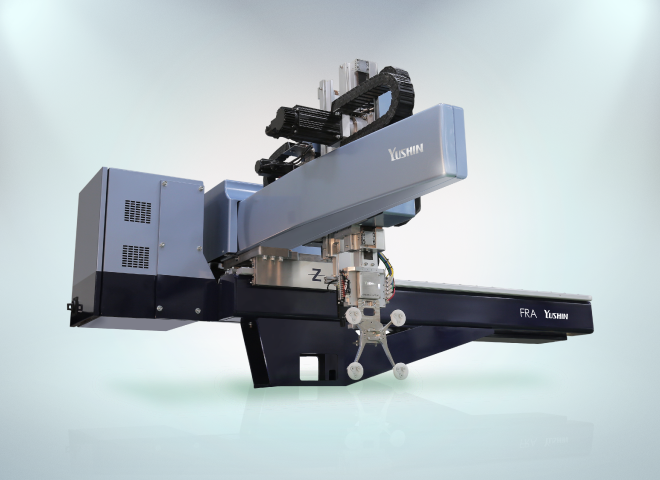
이런 생각에서 FRA가 탄생했습니다.

주요 특징
-

SAFETY
세계 최고 기준의 안전 규격을 표준 탑재①안전 회로
안전 회로를 2중화하였기 때문에 하나의 안전 회로에서 오류가 발생해도 기능을 잃지 않습니다. 안전에 관해서는 타협하지 않는 것이 바로 미래의 표준입니다.
②안전 속도 감시
티칭 중인 로봇 동작이 안전 속도를 넘지 않으므로 안심하고 안전하게 작업할 수 있습니다.
③국제 안전 규격 대응
안전 규격 EN ISO 12100, EN 60204, EN ISO 10218에 대응하고, 안전 카테고리3에 속합니다. CE, GB, KCs 등 각국 기준에 대응합니다. -
CONTROL
타이머 시간 단축으로 이어지는 진동 제어①액티브 진동 제어
고속으로 취출하고 오차 없는 성형을 실현할 수 있습니다. 특히 무거운 어태치먼트헤드나 상하 암을 연장한 경우의 진동 수습까지의 대기 시간 증가를 방지하고
사이클타임을 큰 폭으로 단축합니다.
②아크 모션 컨트롤
곡선 동작에서 축 이동 간의 “부드러우면서 빠른 속도”, 기존 직교형 로봇에는 없는 움직임을 실현했습니다. 진동을 늘리지 않고 사이클타임을 단축할 수 있습니다.
③어댑티브 모션 컨트롤
게이트컷이나 인서트, 개방 위치 등 다양한 상황, 스트로크의 변화에 가장 적합한 제어를 자동으로 선택하므로 모든 상황에서 순조롭고 성형품에 쾌적한 동작을
반복합니다.
④저크 필터 탑재
급격한 감속을 부드럽게 하고 진동을 억제할 수 있습니다. 자동차의 제동 직전에 브레이크의 밟는 강도를 완화하여 제동 시의 충격을 줄이는 원리와 같은 방식입니다. -

YUSHIN IoT
멈추지 않는 로봇에 가까워지기 위해①IoT서비스“INTU LINE”
FRA를 도입한 날부터 바로 이용할 수 있고, 제공된 어플리케이션은 그야말로 직감적으로 쉽게(Intuitive) 사용할 수 있습니다.
②생산 모니터링
스마트폰이나 PC로 시간과 장소를 가리지 않는 간편함으로 생산 수, 가동률, 가동 상황, 사이클타임, 에러 수, 일시적인 오류 수와 생산 현장의 모습을 보여줍니다.
그동안 파악하기 어려웠던 일시적인 오류의 빈도나 시간 등 성형 현장의 가시화가 실현됩니다.
③트러블 슈팅
문제 발생 시 IoT 시스템을 통해 고객의 에러 정보를 유신세이키와 공유함으로써 그동안 고객이 상황을 설명해야 했던 번거로움을 덜고, 당사 서비스 담당자가
현장에 있는 것처럼 문제 해결을 도와드립니다. -

DESIGN
사이클타임 단축①3D 최적 설계 인발프레임
최적 설계 기술로 기존 기종의 반복 정밀도는 유지하면서 경량화를 통한 고속 동작이 가능해졌습니다.
②경량 보디
FRA는 최적 설계를 구사하여 가동부의 질량을 기존 기종 대비 16% 감축. 그에 따라 기존 대비 전체 사이클타임은 최대 5%, 취출 사이클타임은 최대 10% 단축 에성공했습니다. -

EXTENSION
미래의 변화에 대비하는 로봇①로봇 언어 탑재
리드스루 티칭, 플렉시블 티칭과 더불어 해외에서 요청이 많았던 로봇 언어를 표준 탑재했습니다. 고객이 설비를 오래 사용할 수 있도록 미래의 범용성을
중시했습니다.
②후공정 연동
DeviceNet, EtherCAT, EtherNet/IP 등의 범용 통신을 통한 후공정 제어가 가능합니다. 향후 더욱 늘어날 성형 후 검사나 조립 등 고객의 상품 부가가치 향상에 기여합니다. 물론 PNP/NPN 교체에도 대응 완료했으며 미국과 유럽의 주변 기기 제조사의 제품과의 접속도 용이합니다.
③플렉시블 티칭
고객 본인의 PC로 동작 프로그램 작성이나 고난도 변경(인터록 에러 처리 설정 등)까지 프로그래밍이 필요 없는 플로차트만으로 간단히 할 수 있는 프로그램 작성
소프트웨어 ‘플렉시블 티칭’. 기존의 자산 활용과 향후의 설비 변경을 직접 관리할 수 있습니다.
※상기에 기재된 회사명, 시스템명, 제품명은 일반적으로 각 회사의 등록 상표 또는 상표입니다. -

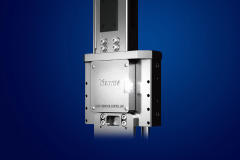
신 슬림형 타입 자세 제어 기구
자동화 및 효율 향상에 크게 기여①최대 50% 슬림화
신규 설계로 구조를 대폭 수정하여 최대 약 50%(당사 기존 대비) 슬림화를 실현.
②간단 조정
언더컷 취출, 고정측 취출 등 컨트롤러에 의한 티칭만으로 복잡한 동작에 대응할 수 있습니다.
③자유로운 조작
취출 로봇 본체와 합쳐 최대 8축 제어(취출 로봇 5축+NC 자세제어 장치 3축)로, 다관절 로봇 수준의 자유로운 동작으로 후공정 기기와의 연동이 용이해졌습니다.
④풍부한 라인업
3축 타입: NC(수직선회+반전+수평선회)
2축 타입: NC(수직선회+반전)/NC(반전+수평선회)/NC(수평선회)+에어 반전
1축 타입: NC(반전)