RAⅡ-α-DW:ダブルウイングタイプ・後工程対応・取出ロボット

ダブルウイングタイプ(DW)システム事例
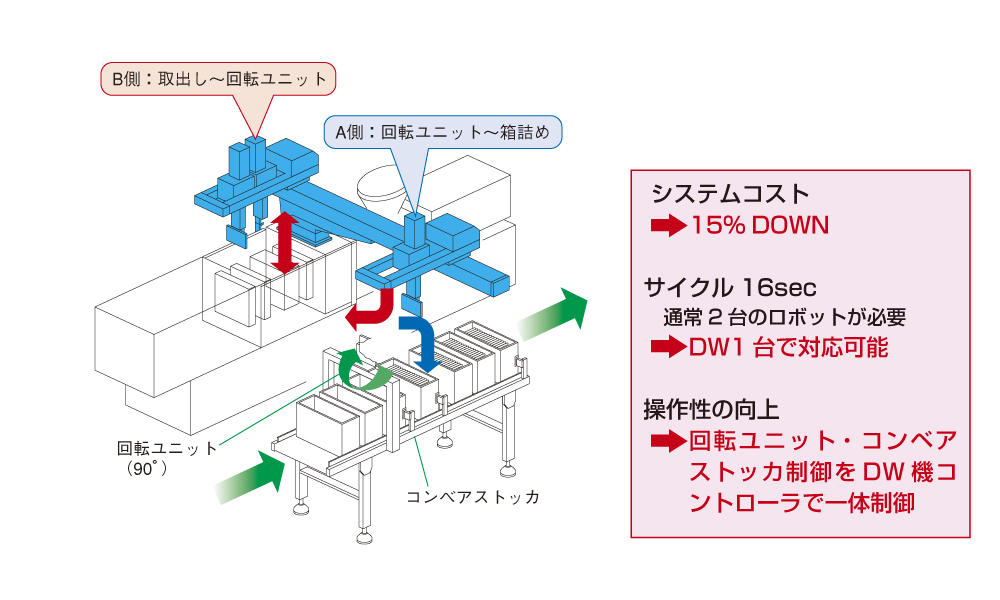
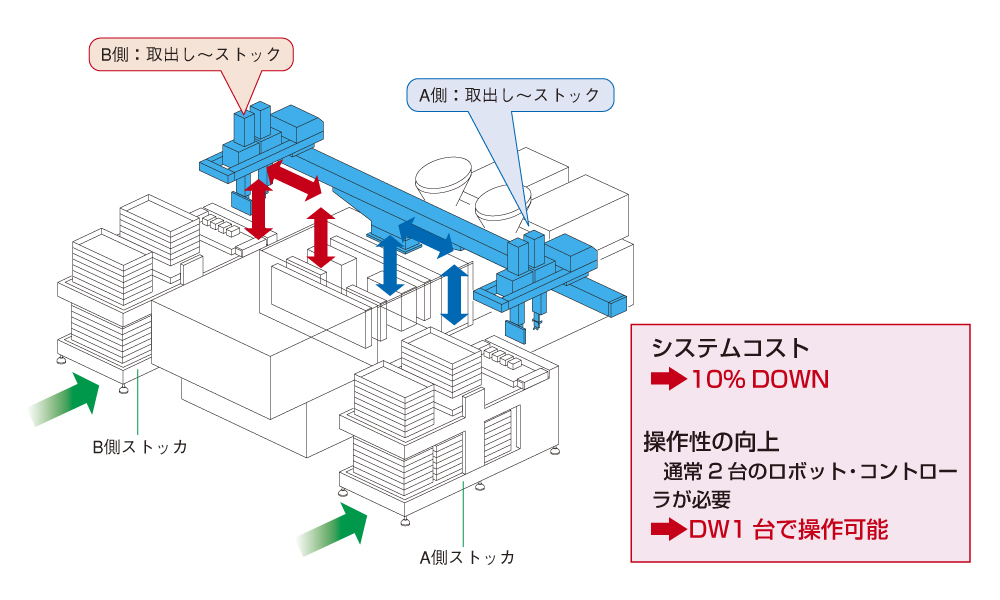
ストックシステム事例
成形品を整列し箱詰めを行うシステム
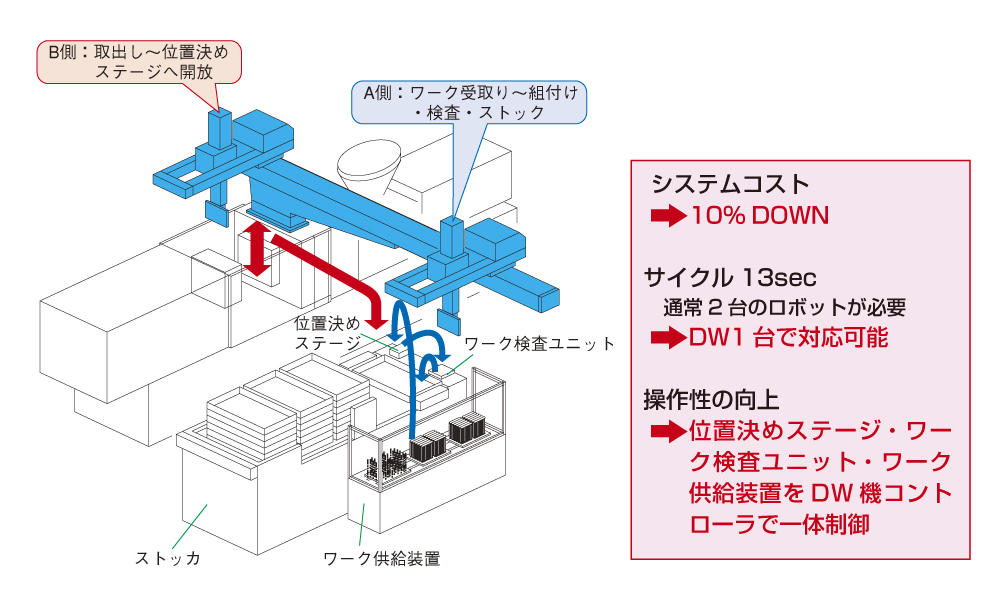
組付け・ストックシステム事例
成形品を位置決めした後にワークを組付け・ワーク検査・ストックを行うシステム
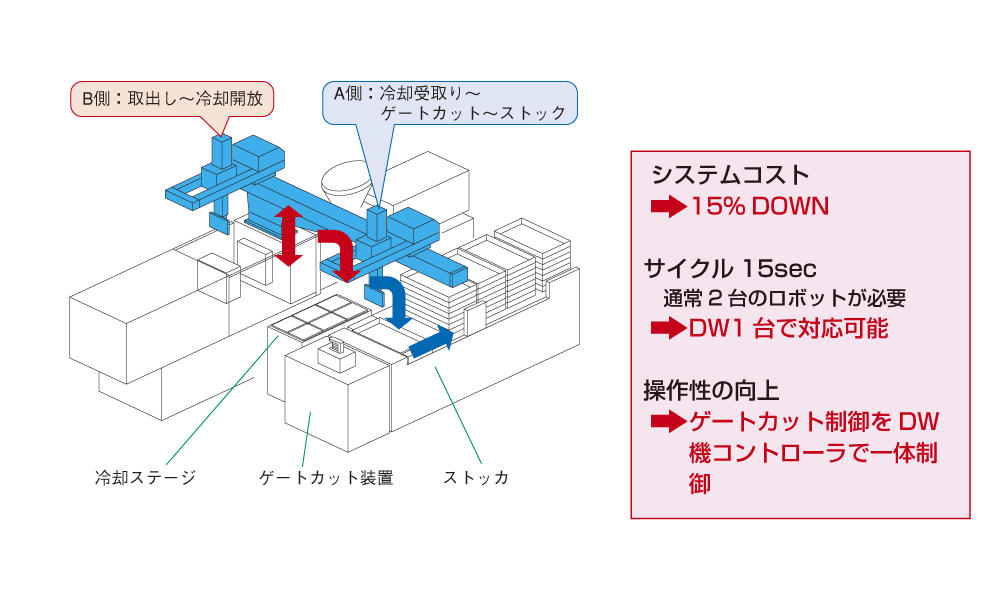
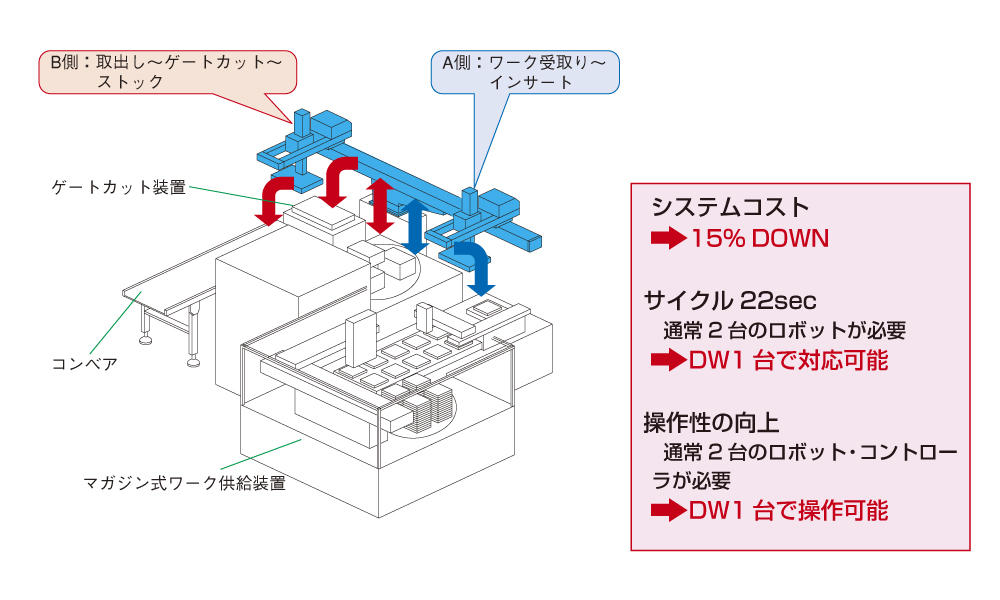
ゲートカット・ストックシステム事例①
成形品を冷却した後にゲートカット・ストックを行うシステム
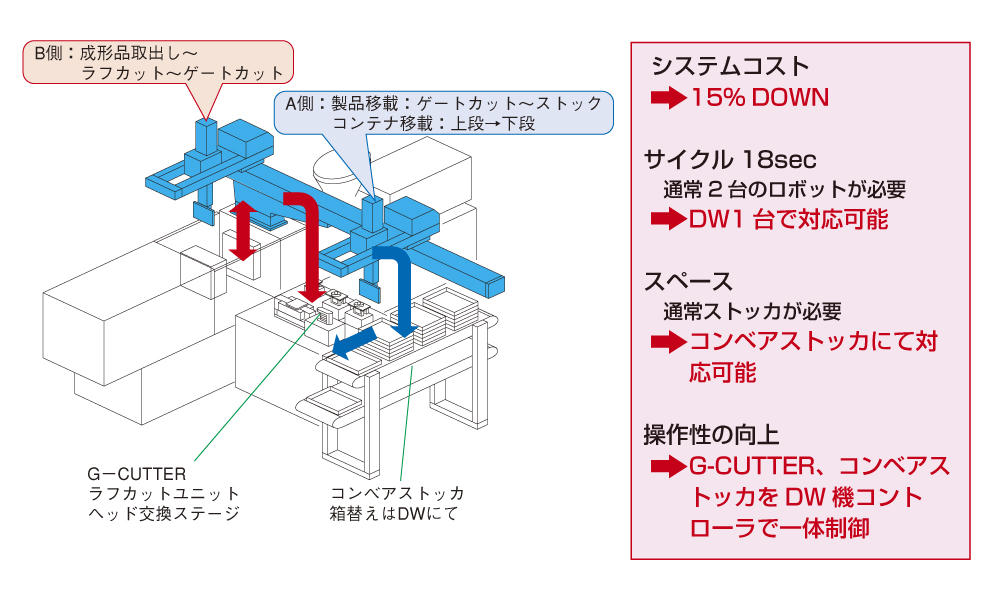
ゲートカット・ストックシステム事例②
成形品をゲート処理後、ストックを行うシステム
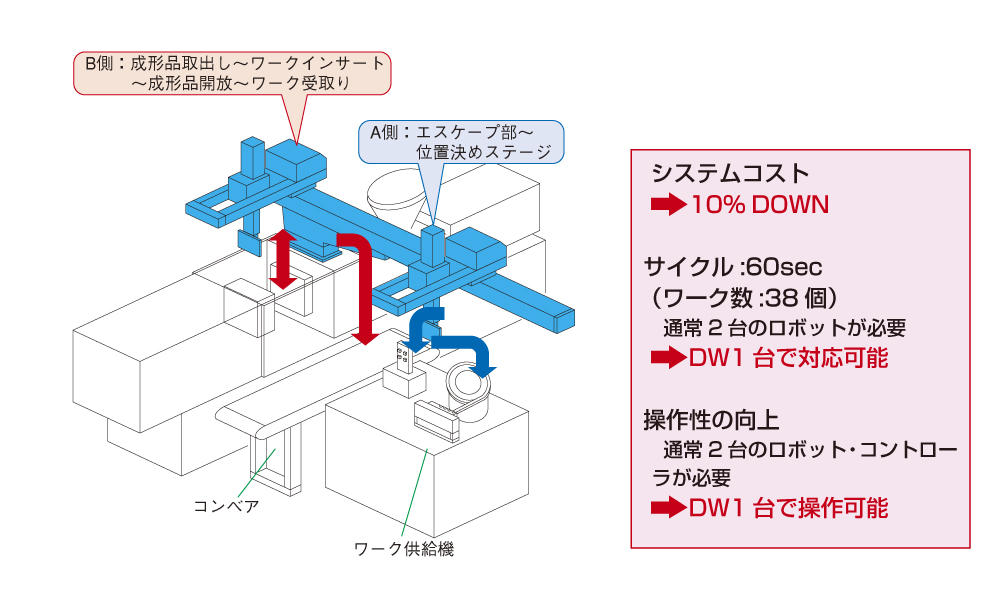
インサートシステム事例①
多数ワークのインサートを行うシステム
インサートシステム事例②(竪型成形)
A側でインサート、B側で成形品取出を行うシステム
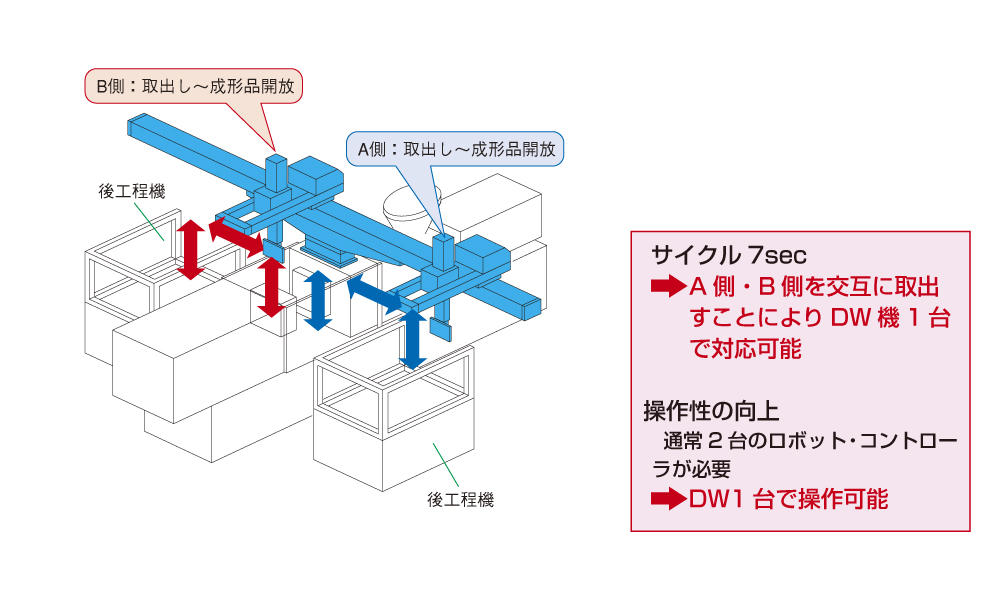
高速システムのサイクルに追従する事例
高速成形で、後工程機の動作時間が必要な場合、A側・B側交互に成形品を取り出すことにより、サイクルに対応するシステム
10軸システム事例
A側とB側を個別に取出・ストックを行うシステム
コンセプト

主な特長
-

1台2役、革新!複合動作
ダブルウイングは、取出と移載の2つのユニットにより、ロボット2台分の動きを実現。2つのユニットは同一のコントローラ(CPU)で制御可能で、煩わしい設定は不要。通常のティーチングだけで簡単に複合動作が完成します。
-
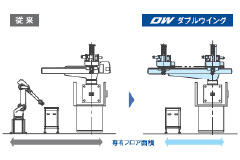
省スペース
ダブルウイングは、従来のロボット2台分の動きを1台でカバー。成形機まわりの限られたフロア面積の有効活用が可能になります。
-
2色・異材質成形に最適
2式のロボットアームを装備2色成形機の2組の金型に残った成形品とランナを1台のロボットで同時に取り出すことができます。

