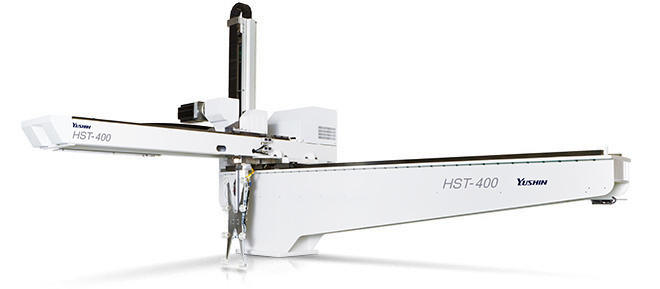
HST:High-Speed Take-out Robots

Concept
Improved productivity via high speed + vibration control
HST robots bring to the table the tools and means for improving productivity in the form of high-speed operation and thorough vibration controls. Higher speeds have been achieved by employing Optimum Design approach to reduce the mass of moving parts, while the enhanced vibration dampening of the CFRP arm combines with anti-vibration measures to shorten settling time.
Features
-

Optimum Design
Joint research with Kyoto UniversityOptimum Design is what Yushin calls its use of CAE (Computer—Aided Engineering) to determine the theoretically best configuration of a robot based on its mechanisms and movements. This approach has been used in recent years to make aircraft and automobiles lighter and more reliable. Through joint research conducted with Kyoto University, Yushin first tested and applied CAE to an EOAT. Following the good results, this Optimum Design approach was employed with take-out robots of the HSA, TSXA, YC and HST series.
-
Winner of the JSME Technology Award
Great reviews in engineering circlesIn 2011, Yushin was honored with the prestigious Technology Award of the Japan Society of Mechanical Engineers (JSME) for “developing high-performance take-out robots for molding machines by structural optimization”.
-

High speed
Lighter weight for faster speedsWith the HST series, design optimization has been individually applied to the structure and configuration of structural and moving parts to reduce body weight. As a result, moving parts have been reduced in weight by approximately 72.5 kg, making the HST robots 25.4% lighter than predecessor models. The lower weight has directly translated into increased speeds of 9.2% over earlier robots without using higher duty drive motors. Moreover, design optimization not only has reduced robot weight but also “ensured the high rigidity needed to capitalize on that weight reduction”.
-

Vibration control
Shorter settling time via Optimum Design + CFRP + vibration controlsIn developing the HST series, Optimum Design approach was also employed to analyze specific frequency and vibration dampening characteristics. As a result, vibration attenuating performance was greatly improved in the form of a 98.6% reduction in settling time (time required for vibrations to fall below a desired level).
-

BENEFITS 1
Shorter set times of timersThe major reduction in settling time makes it possible to shorten the various timers that monitor individual take-out robot steps, which together add up to shorter cycles in actual molding production.
-

BENEFITS 2
Stable take-outBecause minimal vibrations occur during robot motions and stopping, and the enhanced dampening performance quickly quells whatever oscillations are generated, therefore HST robots stably can take out precision molded parts and small delicate parts at high speeds.